



The Discrete Fourier Transform as a Frequency Response
The discrete frequency response H(k) of a Finite Impulse Response (FIR) filter is the Discrete Fourier Transform (DFT) of its impulse response h(n) [1]. So, if we can find H(k) by whatever method, it should be identical to the DFT of h(n). In this article, we’ll find H(k) by using complex exponentials, and we’ll see that it is indeed identical to the DFT of h(n).
Consider the four-tap FIR filter in Figure 1, where each block labeled Ts represents a delay of one sample time. The filter has coefficients:
$$ h(n) = [h(0)\; h(1)\; h(2)\; h(3)]\qquad (1) $$
Note FIR coefficients are usually referred to as b(n). We’re using the symbol h(n) to emphasize that the coefficients are equivalent to the filter’s impulse response. We’ll find the frequency response of this filter, but first we need to derive the frequency response of the unit delay.
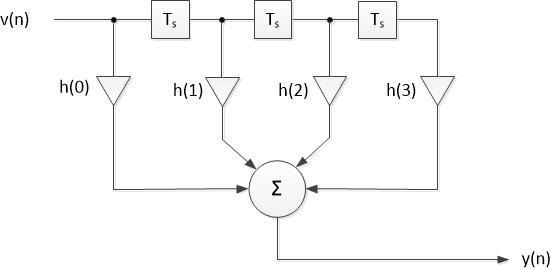
Figure 1. FIR filter with four taps.
Frequency Response of the Unit Delay
Figure 2 shows a discrete-time unit delay of Ts, where Ts is the sample time. In other words, this is a parallel data register clocked at fs = 1/Ts. Let the input be a discrete-time sinusoid of frequency f, with t = nTs:
$$ v(n)= Acos(2\pi fnT_s) \qquad (2) $$
Now define a normalized radian frequency ω:
$$ \omega (rad) = 2\pi f/f_s = 2\pi f T_s \qquad (3) $$
This gives us:
$$ v(n)= Acos(n\omega) \qquad (4) $$
Then the output signal is:
$$ y(n)= Acos(2\pi f(nT_s - T_s)) = Acos(n\omega - \omega) \qquad (5) $$
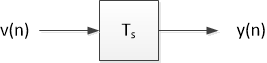
Figure 2. Unit delay of a discrete-time signal.
Writing v and y as complex exponentials, we
have:
$$ \mathbf{v}= Ae^{jn\omega} \qquad (6)$$
$$ \mathbf{y}= Ae^{j(n\omega - \omega)} = Ae^{jn\omega}e^{-j\omega} \qquad (7)$$
Given these expressions for v and y, the frequency response of the unit delay is simply:
$$ H_{UD}(\omega)= \frac{ \mathbf{y} }{\mathbf{v}} = e^{-j\omega} \qquad(8) $$
Frequency Response of the FIR Filter
We can now draw a frequency-domain model of the FIR filter (Figure 3), where the unit delays of Figure 1 have been replaced with HUD = e-jω. Noting that e-jω x e-jω = e-j2ω, we use Figure 3 to write the frequency response as:
$$ H(\omega)= \frac{Y(\omega)}{V(\omega)} = h(0)+h(1)e^{-j\omega}+h(2)e^{-j2\omega}+h(3)e^{-j3\omega} \qquad (9) $$
To be more general, if we let the FIR filter have any number of taps up to N, we can write:
$$ H(\omega)= \sum_{n=0}^{N-1} h(n)e^{-jn\omega} \qquad (10) $$
The normalized radian frequency ω is a continuous variable. Let’s define a discrete f:
$$ f= \frac{kf_s}{N} \; ,k = 0: N-1 \qquad (11) $$
where k is the frequency index and N is the number of frequency samples (We have chosen to use the same number of frequency samples as filter coefficients). Then, from Equation 3, discrete ω is:
$$ \omega= \frac{2\pi k}{N} \qquad (12) $$
Substituting this expression for discrete ω into Equation 10, we get:
$$ H(k)= \sum_{n=0}^{N-1} h(n)e^{-j2\pi kn/N} \qquad (13) $$
Equation 13 is a discrete-frequency version of the FIR frequency response of Equation 10. But if you compare it to a textbook definition of the DFT [2, 3], you’ll see that Equation 13 is also the DFT of h(n)! Thus we can write:
$$ h(n) \iff H(k) \qquad (14) $$
where the bi-directional arrow represents the DFT and inverse DFT.
In our derivation, we put no constraints on h(n), except that it contain no more than N samples. So, we can substitute any discrete-time signal for h(n) in Equation 13, for example:
$$ X(k)= \sum_{n=0}^{N-1} x(n)e^{-j2\pi kn/N} \qquad (15) $$
Which is the DFT of the signal x(n).
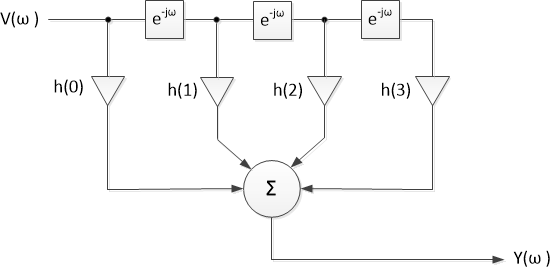
Figure 3. FIR filter frequency-domain model.
Example
Given a 5-tap FIR filter with coefficients h = [1 2 3 2 1]/9, we can use Matlab and Equation 10 to find the magnitude of H(ω). (Note we could also use Equation 13). We’ll let N = 64, and we’ll compute ω using Equation 12: ω =2πk/N. Here is the Matlab code to compute H(ω):
h0= 1/9; h1= 2/9; h2= 3/9; h3= 2/9; h4= 1/9; % coeffs h(n)
N= 64; % number points in freq response
k= 0:N-1; % frequency index
w= 2*pi*k/N; % vector of normalized radian frequencies
H= h0+ h1*exp(-j*w) + h2*exp(-j*2*w) + h3*exp(-j*3*w) + h4*exp(-j*4*w);
Hmag= abs(H) % magnitude of H(w)
The frequency response H(ω) is complex. The magnitude of H(ω) is plotted vs. ω in Figure 4, where we can see the symmetry of the frequency response with respect to ω = π (f = fs/2). Suppose fs = 100 Hz. To plot the magnitude of H(f) vs f, we compute f from Equation 11:
fs= 100; % Hz sample frequency
f= k*fs/N; % frequency vector
The resulting plot is shown in Figure 5. Finally, a more compact and efficient way to compute H(k) replaces h0, h1,… h4 and H in the above code with:
h= [1 2 3 2 1]/9; % signal vector
H= fft(h,N); % Matlab FFT function
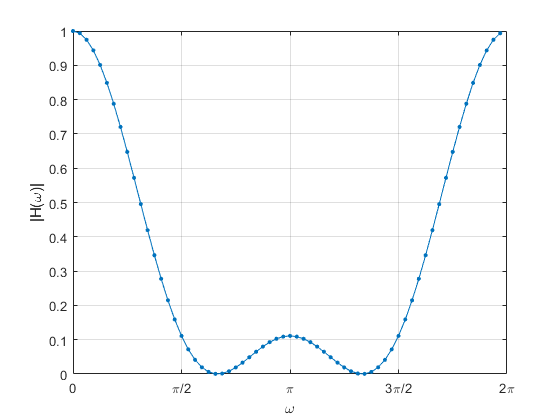
Figure 4. Magnitude of H(ω), N = 64.
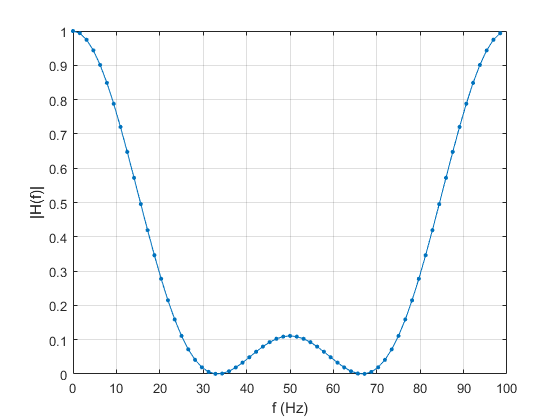
Figure 5. Magnitude of H(f), N = 64, fs = 100 Hz.
Conclusion
To review, we used complex exponentials to develop a formula for the continuous frequency response H(ω) (Equation 10) and discrete frequency response H(k) (Equation 13) of an FIR filter. We then saw that the discrete frequency response is identical to the DFT of the filter’s impulse response h(n). We also replaced h(n) in Equation 13 with x(n) to obtain the formula of the DFT of a general discrete-time signal (Equation 15). You could say we used the FIR frequency response to develop the DFT formula.
A few topics not covered here: To keep the math simple, I chose not to bring the z-transform into the discussion. Also, since the FIR impulse response was inherently limited to N samples, there was no need to discuss spectral leakage or windowing. I covered those topics in an earlier post [4]. Finally, the example computed the magnitude response of an FIR filter, but did not consider the phase response. See [5] for a discussion of the phase response.
References
1. Lyons, Richard, Understanding Digital Signal Processing, 3rd Ed., Prentice Hall, 2011, p 179 – 180.
2. Mitra, Sanjit K., Digital Signal Processing, 2nd Ed., McGraw Hill, 2001, p 131.
3. Lyons, p 60.
4. Robertson, Neil, “The Discrete Fourier Transform and the Need for Window Functions”,
DSPRelated.com, Nov. 15, 2021, https://www.dsprelated.com/showarticle/1433.php
5. Lyons, section 5.8.
Neil Robertson February, 2023
- Comments
- Write a Comment Select to add a comment
Excellent article.
Absolutely agree with Rick Lyons - Figure 3 really brings it home.
As an enthusiastic amateur and maths duffer, I'm very far from Rick's stratosphere, but this piece significantly deepened my understanding. The concept of the unit delay having a frequency response was one that I'd never encountered or intuited before, so many thanks.
EDIT: I appear to have inadvertently 'liked' my own post! I can see no way of un-liking it, so my apologies. The other two likes were absolutely intentional, of course.

You're welcome! Glad you liked it.

HI Neil.
This is a well written blog. Your Figure 3 is interesting. That figure forces us to realize that each little filter in the rectangles is a filter whose magnitude response is unity at all frequencies and whose phase and group delays are equal to one (i.e, one "sample time" where one sample time = Ts from Figure 2).
In your references you listed the 2nd edition of the great Prof. Sanjit Mitra's book. I have the 4th edition of Mitra's book and a wonderful DSP book it is. Mitra is to DSP networks what Mike Tyson was to boxing.
Hi Rick,
I was hoping you would like this post! Indeed, H(w) of the unit delay is 1*e^-jw, which has a unity (boring!) magnitude response, yet is the basis for all digital filters.
I found it surprising that I could "derive" the DFT with just complex exponentials.
regards,
Neil

Hi,
Very interesting read!
I wanted to mention that the DFT of an FIR filter's coefficients can produce a misleading frequency response if you do not pad it with zeros. The DTFT of the coefficients is more representative of how the FIR will perform in my experience.
For instance if you had two FIR filters with the following coefficients
h1 = [1,2,3,3,2,1]
h2 = [3,2,1,1,2,3]
The magnitude of the DFT of both would be identical (they only differ in phase).
However if used as FIR filters their frequency responses would generally be quite different.
This can be illustrated by padding with zeros before taking the DFT.
The padding with zeros is approximating the DTFT.
Indeed.
To post reply to a comment, click on the 'reply' button attached to each comment. To post a new comment (not a reply to a comment) check out the 'Write a Comment' tab at the top of the comments.
Please login (on the right) if you already have an account on this platform.
Otherwise, please use this form to register (free) an join one of the largest online community for Electrical/Embedded/DSP/FPGA/ML engineers:





